Robot Painting
We implemented a hierarchical planning and control framework which is able to create a stylish painting given an input image.
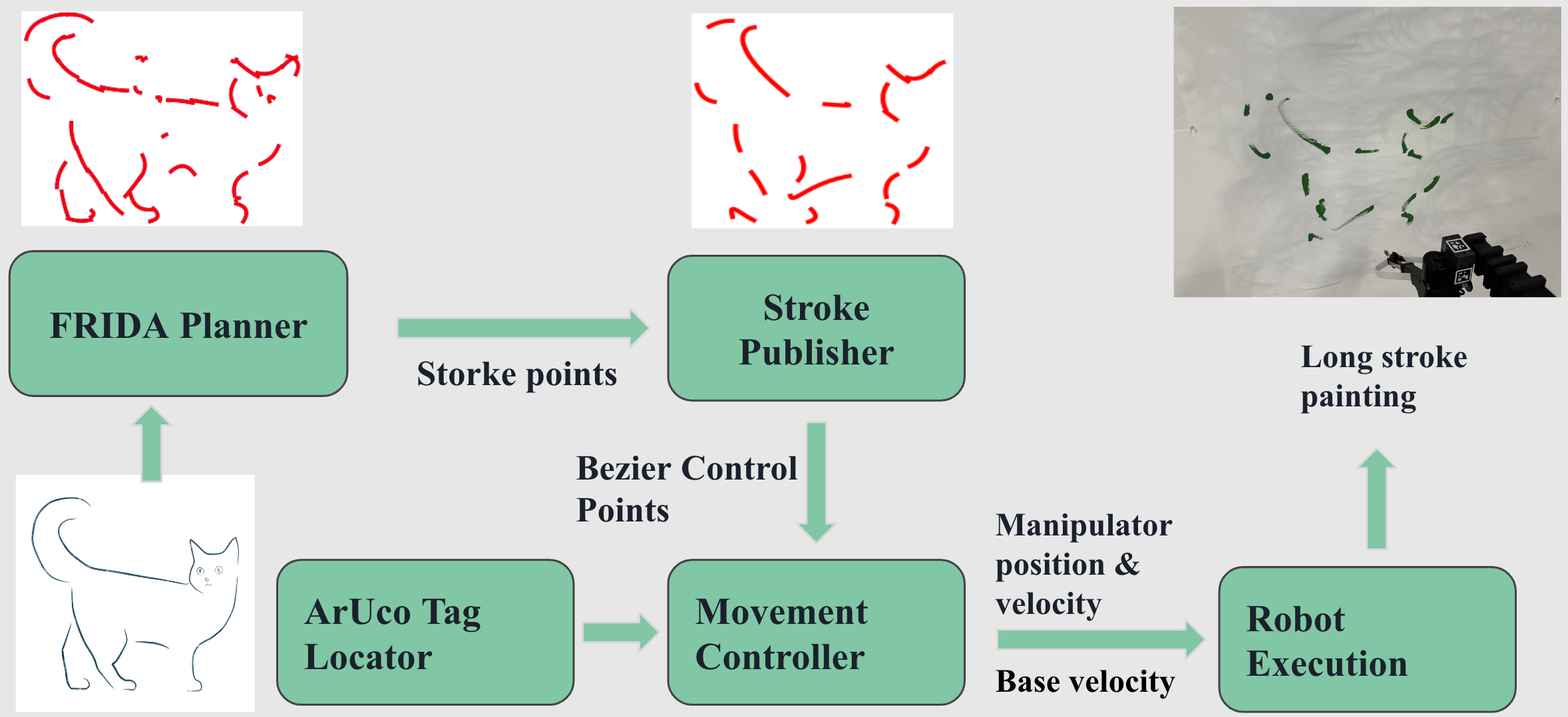
System architecture
Given a target image, high-level stroke points are produced from an FRIDA planner [1], which exploits pre-trained VLMs for image to image mapping. The stroke points are further converted into executable Bezier curve points, and sent to a low-level motion controller for execution. The mobile manipulator is localized by running an ArUco Tag detection program with visual servo.
[1] Schaldenbrand, Peter, James McCann, and Jean Oh. “Frida: A collaborative robot painter with a differentiable, real2sim2real planning environment.” 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023.