Path Planning
We implemented a path planning package for a turtlebot in a pre-mapped environment.
 This is a project of AU336(mobile robotics) of SJTU.
This is a project of AU336(mobile robotics) of SJTU.
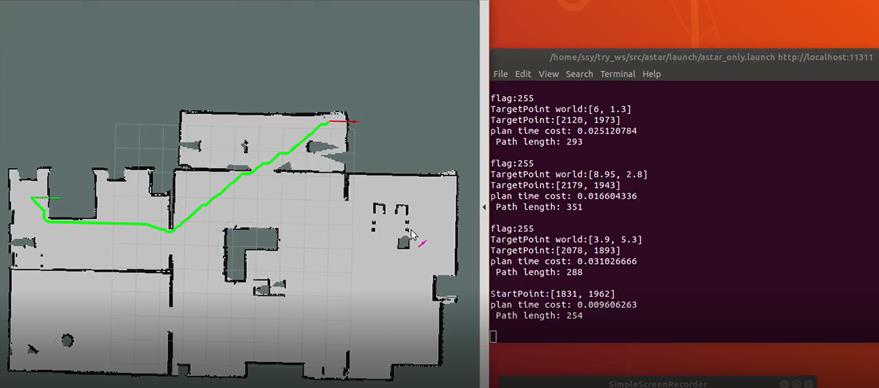
We implemented the A* algorithm in ROS with both C++ and Python to compare their efficiency. And we smoothed the path based on the Floyd path smoothing algorithm. Then, an interactive interface in Rviz was developed to enable us testing the algorithms.