Tracked Vehicle
We designed and implemented a double-tracked ground vehicle to climb obstacles
This is the project of obstacle climbing competition in ME209(Mechanism) of SJTU. We designed ground vehicles in order to conquer obstacles of certain heights and shapes. The size of the robots was restricted, and payloads were required during the tasks.
Mechanism
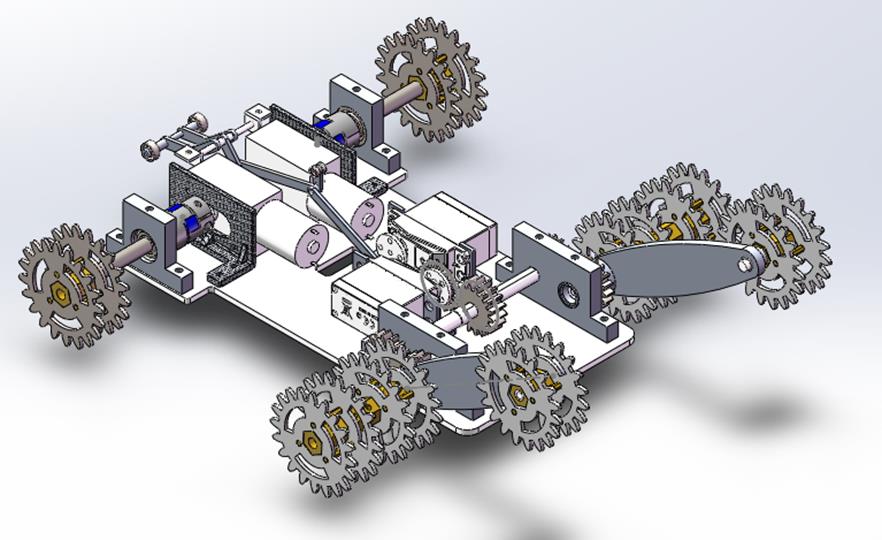
We designed a tracked vehicle in order to maintain high mobility while having good adaptiveness to different obstacles. In order to reduce self-weight and size, we modeled an LP problem and optimized the robot's shape with Gurobi. And we designed proper shafts and gearboxes to improve its loading ability.
Prototype
We built a prototype for the obstacle climbing competition.