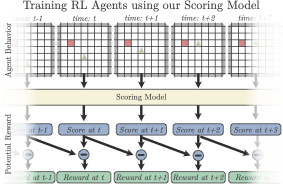
Current Work Enhance RL with LLM Feedback Proposed and verified an RL framework which exploits LLM feedback for reward specification based on potential functions.
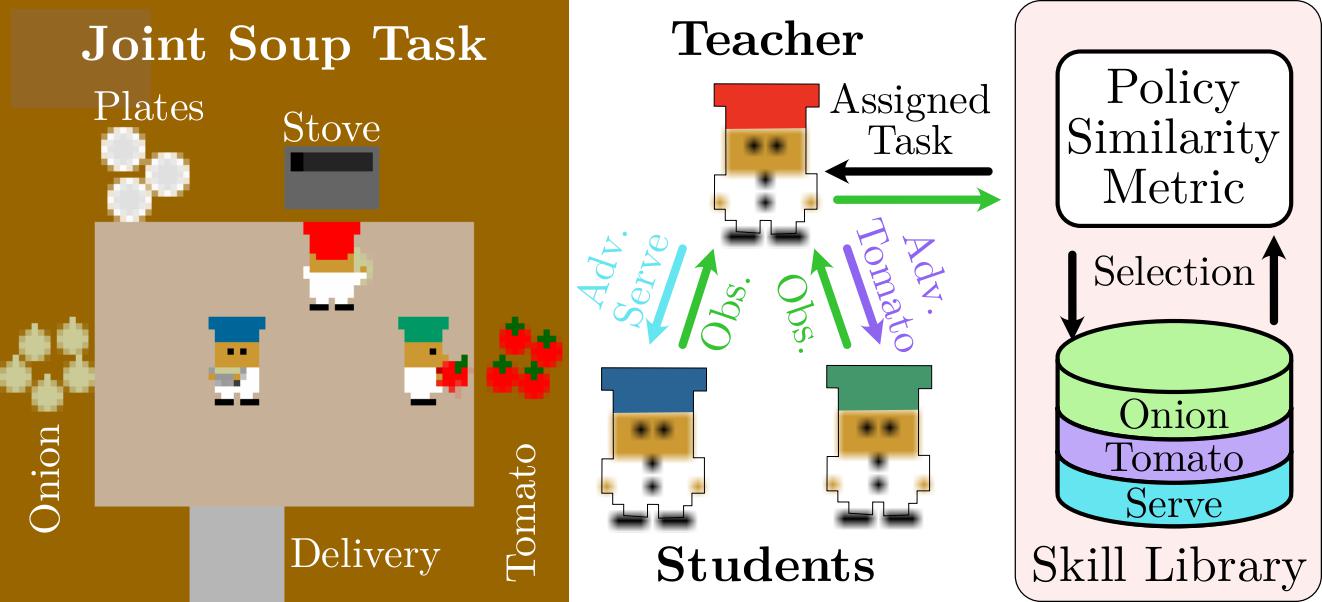
Action Advising for Efficient RL in Ad Hoc Teaming Develop policy transfer strategy based on action advising to enhance reinforcement learning efficiency in multi-agent ad hoc teaming.
Past Work
Active Vision of Coordinated Ground Vehicle Systems Scheduled active vision tasks for a UGV team to enhance vision-based localization of an aerial vehicle for safe navigation.
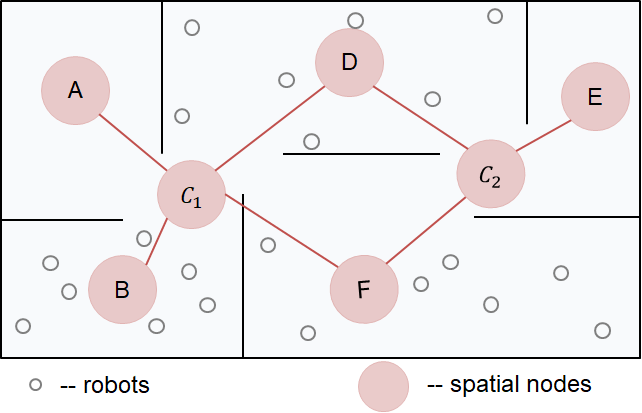
Efficient Large-Scale Team Behavior Manipulation Established a distributed behavior control pipeline using social network insights and reinforcement learning for large-scale multi-agent teams.
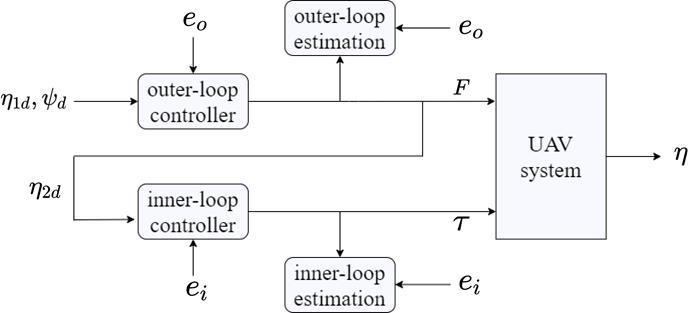
Adaptive Control of UAVs with Parameter Estimation Proposed an adaptive control method with mass-inertia estimation and disturbance rejection tailored for multi-rotor UAVs in aerial transportation tasks.
Design of an Integrated Unmanned Quadruped-Hexarotor System Designed a hexarotor UAV capable of grasping and transporting a quadruped robot through an adaptive docking structure.
LICENSE | NOTICE Powered by Hydejack v9.2.1