Efficient Large-Scale Team Behavior Manipulation
How to control the collective behavior of large-scale agent teams so that they can achieve pre-designed human commands?
From June 2022 to February 2023, I remotely led this research project in the Cognitive Robotics and AI (CRAI) lab, Kent State Unviersity, under the supervision of Prof. Rui Liu. Inspired by the herding behavior in animals and the opinion manipulation in marketing, we believe large-scale robotic crowds can also be efficiently manipulated via several critical agents.
Method
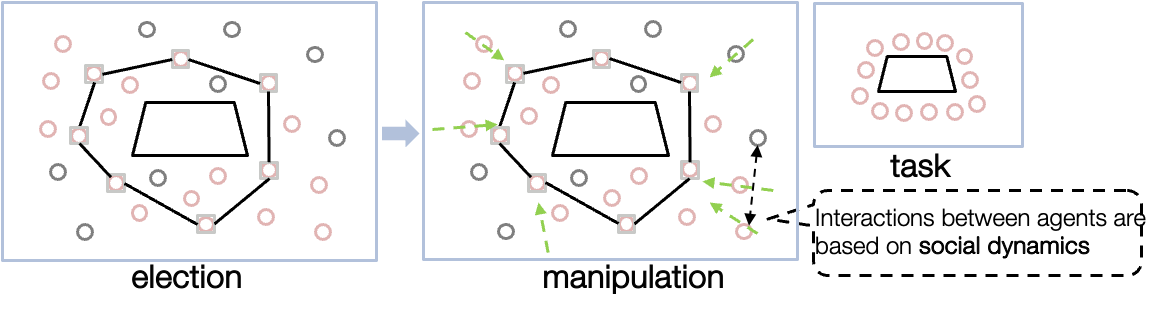
We designed a distributed learning paradigm informed by social topology to elect critical agents based on their ability and power, and collaboratively propagate intended collective behaviors to other robots. Compared with other collective behavior
- Inspired by opinion propagation in marketing, we proposed an election paradigm to elect critical agents with large influence on the team.
- Based on GCN and observed states of their surrounding agents, critical agents manipulate the action of other agents via a learned policy.