Adaptive Control of UAVs with Parameter Estimation
The project was conducted in the laboratory of Cooperative Intelligence of Unmanned Systems (CIUS) led by Prof. Wei Dong.
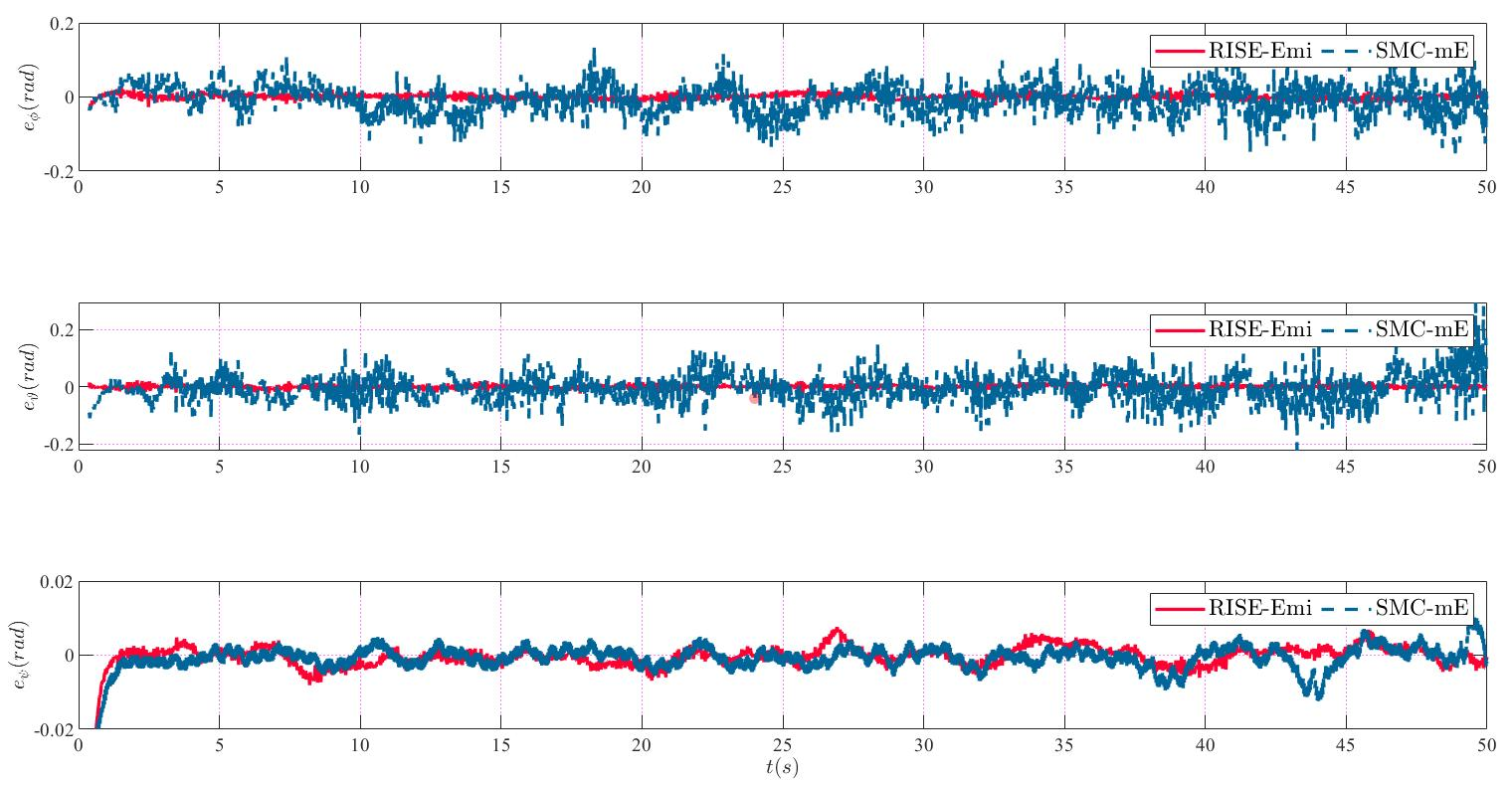
In recent years, unmanned aerial vehicles (UAVs), es- pecially multi-rotor UAVs, have been widely applied to military/civil transportation tasks such as parcel delivery, equipment deployment, and rescue missions. These tasks share common characteristics that the mass-inertia parameters of UAVs vary from flight to flight, and a fine-tune of controllers to retain good tracking performances between missions is time-consuming. To tackle this problem, we designed an adaptive controller for transportation. The proposed method rejects external disturbances such as wind with compensation and estimates uncertain mass-inertia parameters. It exceeds other methods in its smoothness and convergence rate. It is able to achieve 2% estimation error bound in less than 4 seconds for an UAV with mass over 3kg.